サマータイム 3月最終日曜日 2022年3月27日、今日からでした
失敗しました。
今日からヨーロッパはサマータイム。
1時間時間が早くなります。
今日、晩の6時にアポを入れてZOOMを立ち上げたら、「今、日本は何時ですか?カメラの向こうは11時を示しています」
え?! 11時❓
昨日までは10時だったのに。
一瞬意味が解りませんでしたが、そうだ今日から「サマータイム」
すっかり失敗してしまいました。
カレンダーには注意するように書いてあったのですが。
でも、サマータイムの名前がピンときません。
秋口の10月の最終日曜日の時間変更は、日本でも10月末ともなれば夕日が沈むのが早くなり「秋の日はつるべ落とし」というくらいですから、体感的に日本にいてもわかるのですが。
ここ札幌にいて、今日からサマータイムと言われても、「まだ春も来ていませんけど」という感じです。
ZIERONA GORAはこのころは毎日天気も良く日中は気温も15度を上回るようです。
冬の寒さは同じなのですが、春の訪れが全然違いますね。
EUでは夏時間、冬時間という表現をやめ、2021年以降は夏時間と冬時間のどちらかを標準時として選択することになったようですが、名前はなんであれ年に2回時間の変更が必要なことには変わりありません。
でも、これからヨーロッパは夏に向かい絶好のシーズンになるということですね。
羨ましいですね。


ポーランドは、夏ともなれば、4:30には日が昇り、夜9時半近くになってようやく日が沈み、さらに太陽は地平線のすぐ下にずっといる為、陽が沈んでもずっと夕暮れ時が続くような国です。
CULTURE.PL というポーランドのサイトからニュースレターが届きました。
Culture.plは、ポーランド文化国家遺産大臣の支援を受けてポーランドとポーランド文化を世界的に推進している国営文化機関であるアダムミツキェヴィチ研究所の旗艦ブランドです。Culture.plは、ポーランド語、英語、ロシア語の40,000を超える記事を特集しており、ポーランドの最高の文学、デザイン、視覚芸術、音楽、映画などを特集しており、80か国で年間600万人以上の訪問者がいます。お問い合わせは、 editors @ culture.plまでご連絡ください。
こんな趣旨で設立、運営されているサイトです。
随時、ニュースレターも送られてくるのですが、今週、こんな記事が送信されてきました。
本来はポーランドの文化を世界に向けて発信するための組織ですが、今回異例の声明を掲げています。
異なる言語を話す人々、異なる伝統を持って生きる人々を知ることで、私たちは自分自身を豊かにします。世界は非常に多様であると理解していますが、共通点もたくさんあります。
常連の読者が知っているように、私たちは通信社ではないので、現在の出来事についてコメントすることはめったにありません。しかし、Culture.plは、ポーランド文化国家遺産省が監督する国営の文化機関であるAdam Mickiewicz Instituteの一部であり、この事実とロシアとウクライナの両方での出版を組み合わせることで、私たちがウクライナに立っていることを明確にする必要があります。 、ポーランドが国境と多くの歴史の両方を共有している国。ロシア支部の友人や同僚からのこの声明を共有したいと思います。
ロシアのウクライナ侵攻は、他の人々、別の国、別の文化に対する犯罪です。今日起こっていることは、ウクライナだけでなくロシアも破壊しています。攻撃と虐殺を正当化する偽りの宣伝の反響に彼らの声を加えるすべての人は、ロシアとウクライナの人々と彼らの文化の未来を破壊します。特に私たちのロシアのチームメンバーは、プーチンと彼の犯罪者の共犯者と戦うことはすべてのロシア人の義務であると感じています。私たちのチームの誰もがこの侵略をいかなる形でも支持していないことを繰り返し述べたいと思います。
–Culture.plの編集チーム
#WeStandWithUkraine
|
||||||||||||||||||||||||||||||||||||







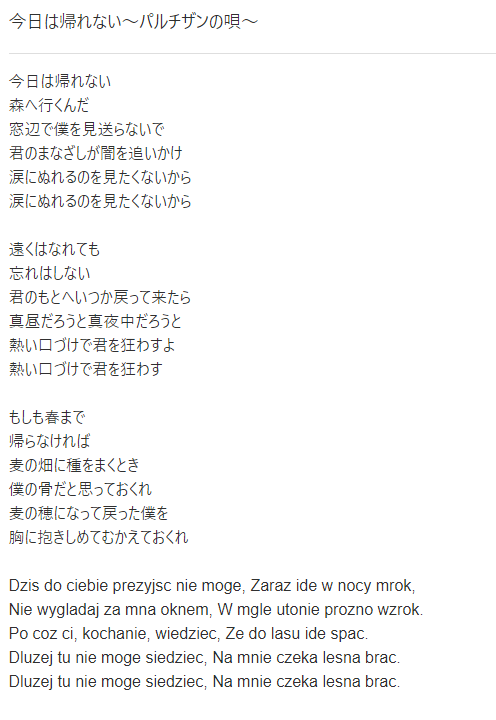
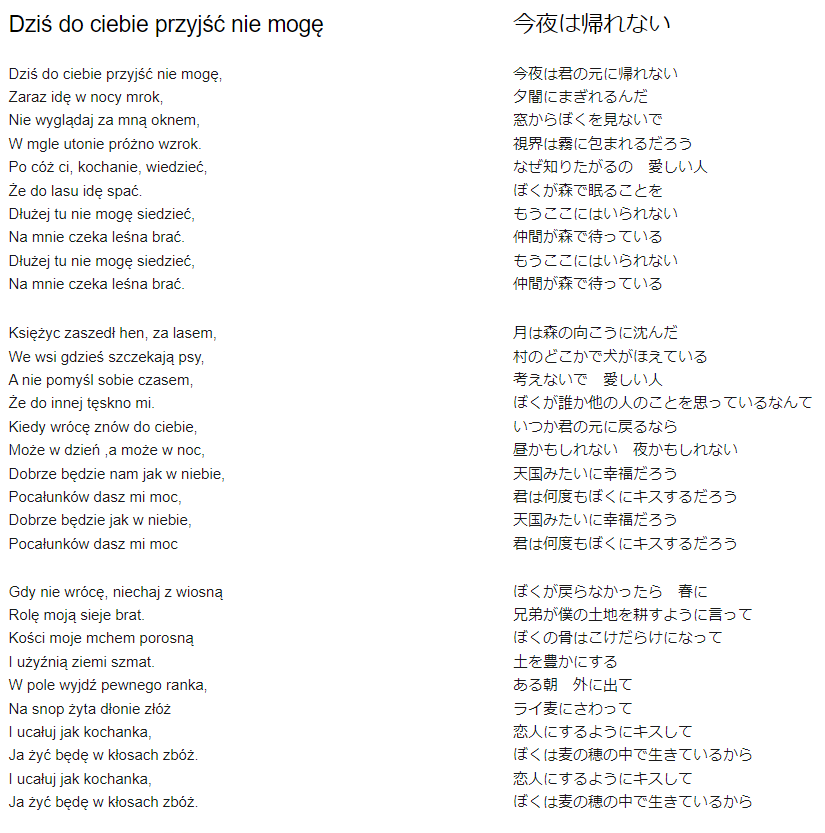
「今夜は帰れない」 ポーランドの対ナチス、パルチザンの唄です。今日、ウクライナで歌われていました。

カタール・ドーハのハマド国際空港を飛び立ち、約5時間半でワルシャワ到着。途中、黒海を過ぎると眼下にウクライナの穀倉地帯が広がってきます。長細くきれいに整地された広大な小麦やトウモロコシの畑です。
今日、2022年2月27日。
テレビを見ていたら、ウクライナの若者の結婚式の場面。
ロシアとの戦争でいつ死ぬかわからないので、5月に予定していた結婚式を今日行ったということです。20代前半の年齢の新郎と新婦。
まだ、社会人になったばかりという初々しい感じです。
確かに戦闘が広がれば一般市民にも多数の被害が及ぶでしょう。
彼が国民総動員令で軍隊に召集されることもあり得ます。
結婚式を早めようとする気持ちもよくわかります。
周りを囲んだ家族や友人に祝福され、民族衣装を着た新郎と新婦。
二人の衣装に描かれているのは、「幸運のお守りの刺繍」。
ここで、画面が切り替わり二人の若者がアサルトライフルをもって立っています。軍服ではありませんが明らかに戦闘服を着ています。
この二人は、さっき結婚式を挙げたばかりの二人です。
これから国を守るため戦闘地域に発つと言っています。
まわりの人たちが歌っているのは「今夜は帰れない」
(この曲は第二次世界大戦中の1943年に、ナチスに抵抗するレジスタンス運動の闘士であった Stanisław Magierski により作詞・作曲されたものです)
戦後75年も過ぎて、こんな状況でこの歌を聞くとは思ってもいませんでした。
ワクチンの3回目の接種が始まっています。(ポーランド)
1月28日にジェロナグラの19歳の大学生がワクチン3回目の接種したと話しています。
29日、土曜日にいつものようにZOOMで日本語の勉強をしたのですが、昨日の晩は腕がとても痛くて眠れなかったとのこと。ファイザーだそうですが、今回が一番痛かったと言っています。
ジェロナグラ大学の教員は大学で接種し、学生は市内にある集団接種会場で接種が受けられるそうです。
彼女は駅のそばの救急センターで受けたとのこと。
勿論、大学生が接種するくらいですから、両親や祖父母はとっくに3回目を接種ずみです。
2月の末に友人3人と一緒に生まれ故郷のポルトガルのポルトに1週間遊びに行くので、3回接種の証明がないと旅行できないということで、安心したようです。
スマホを見せてもらったら、スマホの画面に「個人ID」[運転免許」「ワクチン接種証明」等の個人情報がすべて入っていました。
日本の現状を顧みると、日本が工業技術が進んでいるといってもこれからの世界の潮流に乗って発展していけるかとても心配です。
今回のコロナ禍で日本の社会体制がきちんとしているか、政治がリーダーシップを発揮できているか、将来の技術開拓についていけるのか、問題解決能力のある人間を育成できるのか、自分の身の回りのことを考えても不安な点が多々あります。
例えば、
①テレビで北海道の感染症の専門家の大学教授が質問に答えてこんなことを言っています。
質問:幼稚園、保育所でクラスターが発生しオミクロン株は従来のコロナと違い10代以下の年齢層にも簡単に広がってきています。どんな対策が必要でしょうか。
こたえ:私は幼稚園児や保育園児にはマスクはしないほうが良いと言っています。小さい子供はマスクを調整できませんから。ですからクラスを分けるなどの対策をとるのが良いと思います。
そうです。北海道のたいていの幼稚園児はマスクをするという訓練を受けていません。指導する側がマスクはさせられない、しないほうが良いと判断しているからです。
結局、子供間で感染は仕方がない。せめてクラス分けで集団を細分化し罹る人数を抑えるしかない。こんな話です。
これが対策と言えるでしょうか。どのように子供たちにマスクをさせられるよう指導するかを考えるのが対策だと思うのですが。
マスクをしなくてよい場面はどのような場合か。最低限今後何週間「いつもと違って」マスクをすべきか。今までの対応では通用しないのはなぜか。
全国的に教育機関は幼児のマスク着用問題をどんなふうに考え、どんな工夫をしているのか。
こんなことを開陳して欲しかったのですが。
こどもにプログラミングを教えている立場でいうと、プログラミングの授業中はマスクをすべきです。
運動中はマスクをしたままでは呼吸に影響するかもしれませんが、机に向かい椅子にすわっている状態では、全員がマスクをすべきです。
その中に鼻が詰まっているような子がいても、良く観察していると自分でマスクを調整してうまく呼吸しています。
専門家はもっとケースを細かく分析して対応策を明示すべきだと思います。
その際には、科学的な判断理由を示すことは重要です。どんな基準や知見の基づいた判断かを示さないと後々検証できないからです。
そんな知的な訓練が「大学教授」と言われる人たちにも徹底していない、これが日本の現実です。
そんな状態の札幌では、先週85歳の知人が2月3日に予約が取れたと言ってきました。
今回の第6波でも北海道の死亡者の人口比が今までのように悪い結果になりそうな予兆も見られます。
全国でも3%に満たない接種率。この第6波は接種なしで予防しなくてはと覚悟しています。
今、私は家の中でもマスクをして行動させられています。万が一の場合でも家族にうつすリスクを少しでも減らすためです。
また、「抗原検査キット」はプログラム教室から2本、自費購入2本で準備しています。
ポーランドの鉄道(オンライン チケット)TLKでワルシャワからジェロナグラへ
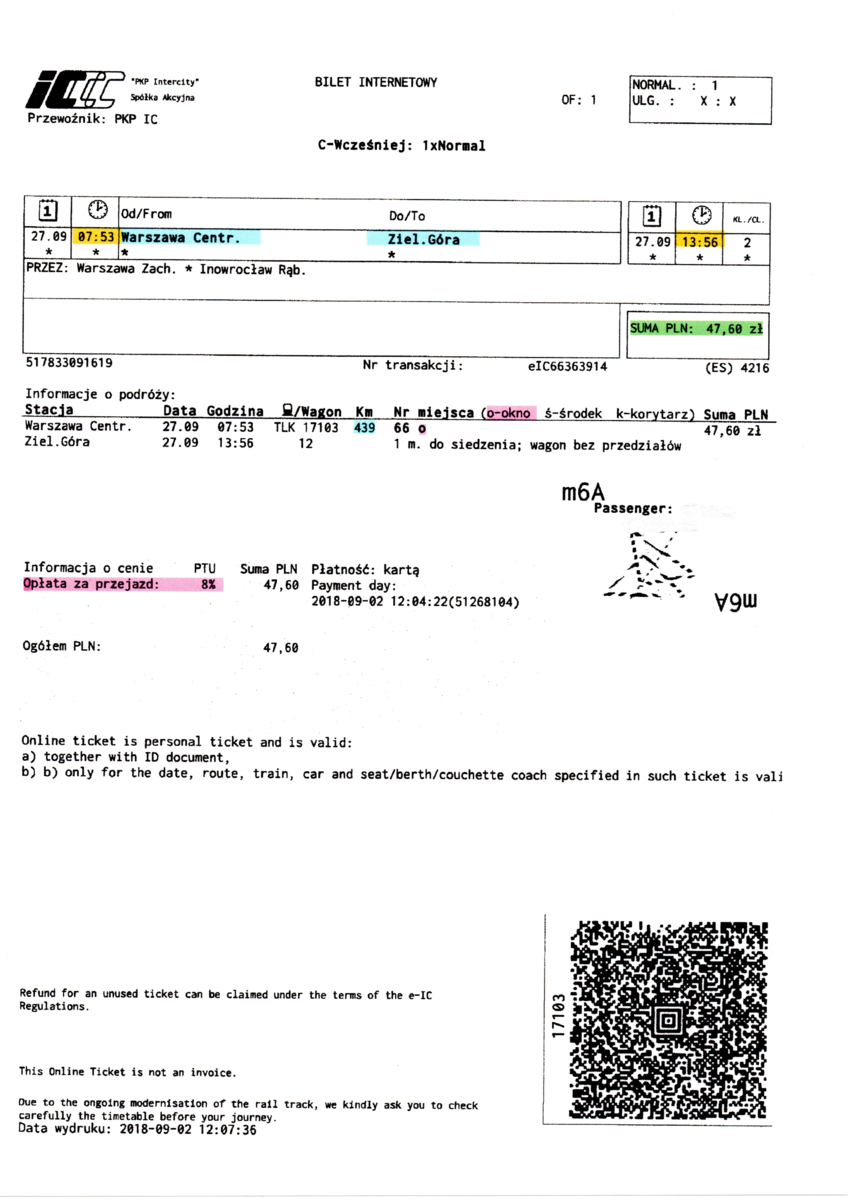
これは、ワルシャワからジェロナグラまでのPKP(ポーランド国鉄)のインターネットチケットです。
9月27日 朝7:53分にワルシャワ中央駅を出発してジェロナグラに昼過ぎの13:56分に着きます。
EICというもう一つ早い特急列車もありますが、EICでは「ポズナニ」か「RZEPIN」で乗り換えが必要です。
TLKはジェロナグラのような小さな地方都市(県の中で行政機能が2つに分かれた長野、松本の松本や前橋、高崎の高崎のような立ち位置の街)でもこんな直通列車があります。
それだけ、ジェロナグラがワルシャワから遠いとも言えますが。
ワルシャワ中央駅は2階のコンコースからエスカレーターで降りると各ホームになります。
一本のコンコースに各ホームが付いているので単純な構造なのですが、何番ホームか心配だったので、前日に一応コンコースに掲示している案内板を確認に行きました。
一等座席は6人のコンパートメントタイプ、二等八人コンパートメント。
私は二等を予約しましたが、別段狭いとも感じませんでした。
439km、約6時間の長旅、
昔の特急列車で、東京から西に向かって琵琶湖近辺までいく感じです。
それなのに、料金は47.60ズォテイ。 日本円で1400円くらいです。
いかに2等車両とはいえこの安さには驚きです。
あまりに安いので、逆に何かの間違いかと心配もしましたが、途中で車掌が検札に来ても、パスポートを確認しただけで問題はありませんでした。
座席は「O」okno(窓側)
ただ、窓側を取って景色を楽しもうと思ったのですが、景色にほとんど変化がなくてすぐに飽きてしまいました。
途中で止まる駅も日本と違い駅の周りには建物があまり見当たりません。
町の中心部は駅から離れたところにあるようです。
街らしい街はポズナニぐらい。後は、日本の単線の田舎の駅前という感じです。

この、キップを改めてみると
列車は「コンパートメントのないワゴン」と書いてあります。
ワルシャワには6回くらい行ったり来たりしたので、コンパートメントの列車は別の時と記憶が混乱しているのかもしれません。
確かにコンパートメントのない普通の日本にもあるような特急にも乗りました。
その時は席がちょうど車両の真ん中で、自分の席の次から席の方向が変わるのでちょうど背中に隙間ができトランクが2つぴったり納まったのでとても便利だった記憶もあるのですが。
ポーランドの水事情 ポーランドの水道水は飲めますか?
ポーランドの水は飲めますか?
外国に行くと、その国の水道水は飲めるかどうかが話題になります。
水道水が安心して飲める日本ですが、一方では、外国の水を飲むことには大きな抵抗があるようです。
確かに旅行中に現地の水を飲んでおなかを壊したという話はよく聞きます。
まずの結論。
旅行中は、現地の水をの飲まないほうが良いでしょう。
旅行中は、腹痛でも大事です。せっかくの旅行が台無しになってしまいます。
そんなリスクは少しでも避けるべきです。
さて、しばらく滞在する場合です。
ポーランドの場合、ワルシャワ水道局は「飲める」と正式に告知しています。
私のいたジェロナグラではどうでしょう。
大学にある水道水の蛇口から直接水を飲んでいる学生はいませんでした。
授業にはたいてい、みんな「ボトル」をもってきています。
しかし自販機で「水」も売っていましたが、あ まり自販機の水を買う姿も見られません。自販機で買うのは「コーク」や「ファンタ」「ドクターペッパー」
そんなところから、みんなのボトルに入っているのは自宅から持ってきた水だと想像します。
ポーランド人の友人に聞いてみたところ、ボトルに入っている水は「Tap Water」とのことでした。
ポーランドでは、ヨーロッパの各国でそうであるように、炭酸入りの水は人気です。
炭酸入り gazowana
炭酸無し niegazowana
値段は500ml入りで高くても60円くらいでしょうか。
日本に比べれば安いものです。
ただ、水を買って困るのは重いこと。
スーパーにバスで買い物に行き、他にも重いものを買うのに、さらにその上水まで買っては重労働です。
500mlを10本買って5キロ。
私は、たいてい2本くらいしか買いませんでした。
それも、2本とも「gazowana」
肉やチーズ、ハムなど油っこいものになりがちなので、ガス入りの方がさっぱりして飲みやすいようです。

硬水と軟水
衛生面はともかくとして、日本人がヨーロッパの水に慣れないのは、『硬水』だからだそうです。
日本のように雨量が多く、川の流れが急で河川の短い島国では、水に溶ける成分が少ないためほとんどの地方で水は『軟水』です。
ヨーロッパのように、地下水も河川の水もゆったりと石灰質の地層の中を時間をかけて流れてくる地域とは水質が違うのは当然です。
例えばジェロナグラはオドラ川の河川域ですが、この川はチェコ共和国北東部のズデーデン山脈に源流を発しバルト海に流れ込む川です。
チェコ領内を112km、ポーランド領内を742km(うちドイツ国境を187㎞)流れて海にようやく到達するわけですが、源流からジェロナグラまですでに700kmくらいは流れてきています。
日本でいちばん長い信濃川は367kmなので、信濃川の2倍は流れてきているわけです。その上、オドラ川はズデーデン山脈を抜けてポーランドに入れば、ヨーロッパ大平原の中をゆったり流れてきます。
それに対し、信濃川は長野市近辺ではゆっくりになるものの、長野県と新潟県の県境の野沢温泉や津南町、十日町近辺では急こう配を流れ落ちています。そのうえ、春は雪解け水、梅雨や台風も来るわけですから、どんどん新鮮な水で水かさが増すので新潟の水は超軟水で新潟のお酒は「やさしい」と言われるわけです。
日本の硬水地域
県別で日本の水道水でいちばん硬度が高い県は「千葉県」です。
その中でも一番高いのは千葉県の房総半島の中心部に位置する「大多喜町」のようですが、私の育った「安房」地域の硬水度も相当なものです。
安房地方の主要な水源地の三芳水道事業団(真倉・さなぐら)が3位、同じ事業団の(山本)5位となっています。
つまり、小さいときから「硬水」を飲んで育っていますから、硬水に免疫があるということです。
この地域に硬水が多いのは、土地が広いためでは決してなく地下に「古代のサンゴの化石」があるためと言われています。
そのサンゴ化石の石灰質を水が通って湧き出してくる為、「硬水」となっているようです。
小さい頃はやかんの中にはいつも灰白色の塊がこびりついていました。
ですから東京で生活したり、東北地方で生活し始めた時、何年使ってもやかんに澱が付かないのを不思議に思いました。
日本ではそれが当たり前の事だったのですが。
ジェロナグラでも水道水を電気ポットで沸かしていると1か月も経たないうちに底の方に澱がたまってきます。
それを見て同じ硬水なんだと実感した次第です。
BRITAのポット型浄水器
澱を毎月こそぎ落とすのも面倒なので、BRITAの浄水カートリッジを購入しました。
日本のバージョンでは「ミネラル分はそのまま、塩素を除去」なのですが、ヨーロッパでは「塩素分は日本より少なめ、ミネラルが豊富すぎ」なため、現地バージョンの浄水カートリッジが一番です。
しかし、浄水カートリッジは近所のスーパーを何軒も探しましたが売っていません。
ようやく、アパートと街の中心部を結ぶバス路線の間にある、Carrefour というハイパーマーケットで入手することができました。
効果はてきめんです。
BRITAを通したら全く石灰分の澱は電気ポットにつかなくなりました。
日本では浄水器を使ってもあまり効果を実感することはなかったのですが。
ちなみに中国では
中国の哈爾浜では、絶対にミネラルウォーターが必需品です。
大学の生協では5Lのボトルを売っていて、私は2日に1回は2本10Lを買い出しに行きました。
仲間の間でも、朝、顔を洗う水や歯を磨くときの水をどうするかが話題になったくらいです。
絶対、ミネラルウォーターです。
味から言うと、中国製の天然水のミネラルウォーターよりコカ・コーラで製造しているろ過水の方が美味しいと思います。
学生寮では、15Lの水を定期購入する斡旋もしていましたから、生水を飲む人は中国人にもいないんじゃないかと思っています。
ポーランドでは確かにミネラルウォーターの品数は多いのですが、5Lや10Lのボトルは見かけたことはありませんでした。
お風呂の水以外はすべてミネラルウォーターとすれば、かなりの水を買わなければならなくなります。
ですから手が空いているときは、必ず生協に立ち寄り、「水を買う」これが日課の生活です。
洗濯しようにも最初出てくるのは、赤い水。
水道代は寮費に含まれいくら使っても無料だったので、洗濯もお風呂も赤い水が少しでも薄くなるまで出しっぱなしにしていました。
もともとの水がわるいのか、配管の錆などが出てきているのかわかりませんが、こういう地域では、絶対「水道水」を飲む気になれません。


食べるものを買おうにも、生協に行っても、売っているものが怪しくて、パンは北海道産小麦使用と書いてあったものが一番おいしい!。
哈爾浜まで来て「北海道産?」と思いましたが、中国では安心、高級のブランドのようでした。
結論を言えば
ポーランドでは「水道水」を飲むことは問題ありません。
食事中飲む水は「ミネラルウォーター」
料理に使う水は、直に「水道水」
珈琲や紅茶は「BURITAのろ過水」
こんな感じでしょうか。
ポーランド人も料理は「水道水」を使っているとのことでした。
私自身は、コーヒーを入れるのは「水道水」でした。
もともとコーヒーはトルコ軍がウィーンを攻める時、悪い水を飲んで体調を壊さないようにするためコーヒーを飲んでいたという話もあります。
コーヒーの粉自体が「活性炭」のようなものですから。
更に、ドリップペーパーを節約するため、コーヒーの粉とお湯をじかにカップに入れ上澄みを飲む「トルコ式」の飲み方でも飲んでいました。
一杯用のドリップペーパーを買っていったのですが、結構飲むので、何か月も持ちません。
そこで、教えてもらった「トルコ式」を併用していたしだいです。
キュリー夫人 ポーランドを代表する科学者です
キュリー夫人とポロニウム
1867年ワルシャワに生まれました。
当時のポーランドはウィーン会議で分割されワルシャワ公国という名はあるものの実質的にロシアに併合された状態でした。
ソルボンヌ大学で勉強を始めた彼女は、
放射能の研究をし、ラジウムとポロニウムという新元素を発見しました。
1898年のポロニウム発見時、まだ、ポーランドという国は復活していませんでした。
祖国ポーランドをロシア帝国から解放する運動に強い関心を寄せていたキュリー夫人は
発見した元素を故国ポーランドのラテン名(Polonia)にちなんで「Polonium」と名づけたものです。
彼女はその後「ノーベル物理学賞」と「ノーベル化学賞」を受賞しています。
この、キュリー夫人にちなんだ時計がジェロナグラで作られています。
生誕150年を記念して作られたとのこと。
生誕150年記念時計
それが、この時計です。
ポロニウムの元素番号84にちなんで、文字盤の「8」と「4」の数字が塗りつぶされています。
また、さらに文字盤にポロニウムの電子配列が輝石でかたどられています。
女性用の小ぶりな腕時計は84個のダイヤモンドが埋め込まれているそうです。


ポロニウムと暗殺
2006年元ロシア連邦中佐のリトビネンコ氏が暗殺されました。
その時に使われたと言われているのが、この「ポロニウム」です。
ポロニウムから出る放射線はα線のみで外部ならば紙一枚で遮ることができます。
ところが、体内に入ると、放射線量が非常に多くDNAを切断してしまうようです。
タバコ煙にも放射物質(ポロニウム)
タバコの煙にはこのポロニウムが含まれています。
フィルターを通しても3%しか除去できません。
のこり97%はフィルターをすり抜け気管支に取り込まれます。
年月を経ればPb21→ポロニウム210へどんどん変換しポロニウム濃度が高まってきます。
癌の治療に
このポロニウムのα線の飛程の短さに着目して、体内から腫瘍組織をたたく研究が進められています。
恐ろしい放射能物質も使い方次第では、有効な治療薬に活用できるということでしょうか。